
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Článok na pochopenie rozdielu medzi krokovými motormi a servomotormi a servomotormi
I. Rozdiely medzi krokovými motormi a servami a servomotormi
Krokový motor: je elektrický impulzný signál do uhlového alebo riadkového posunu častí krokového motora s otvorenou slučkou ovládacieho prvku. Jednoducho povedané, spolieha sa na elektrický impulzný signál na ovládanie uhla a počtu otáčok. Takže sa spolieha iba na pulzný signál, aby určil, koľko rotácie. Pretože tu nie je žiadny snímač, uhol zastavenia sa môže líšiť. Presný impulzný signál však odchýlku minimalizuje.
Servomotor: pri riadení rýchlosti motora sa spoliehajte na riadiaci obvod servomotora pomocou snímača na ovládanie polohy otáčania. Ovládanie polohy je teda veľmi presné. A rýchlosť otáčania je tiež variabilná.
Servo (Electronic Servo): Hlavnou súčasťou serva je servomotor. Obsahuje riadiaci obvod servomotora + súpravu redukčnej prevodovky. Ach áno, servomotor nemá nastavenú redukčnú prevodovku. A servo má redukčnú prevodovku.
V prípade limitného serva sa na určenie uhla natočenia ramena kormidla spolieha na potenciometer pod výstupným hriadeľom. Riadenie signálu serva je signál modulovaný šírkou impulzu (PWM), kde mikrokontrolér môže tento signál ľahko generovať.
II. Základný princíp krokového motora
Ako to funguje:
Normálne je rotor motora permanentný magnet a keď prúd preteká statorovými vinutiami, statorové vinutia vytvárajú vektorové magnetické pole. Toto magnetické pole spôsobí otáčanie rotora o uhol, takže smer dvojice magnetických polí rotora bude rovnaký ako smer magnetického poľa statora. Keď sa vektorové magnetické pole statora otočí o uhol. Rotor sa tiež otáča o uhol s týmto magnetickým poľom. Pre každý vstupný elektrický impulz sa motor otočí o jeden uhlový krok dopredu. Jeho výstupný uhlový posun je úmerný počtu vstupných impulzov a jeho rýchlosť otáčania je úmerná frekvencii impulzov. Zmenou poradia, v ktorom sú vinutia napájané, sa motor otáča. Preto počet a frekvencia impulzov a poradie napájania vinutí každej fázy motora môže byť riadené na riadenie rotácie krokového motora.
Princíp výroby tepla:
Zvyčajne vidieť všetky druhy motorov, vnútorné sú železné jadro a cievka vinutia. Odpor vinutia, výkon spôsobí stratu, veľkosť strát a odpor a prúd je úmerný štvorcu, ktorý sa často označuje ako strata medi, ak prúd nie je štandardný jednosmerný alebo sínusový prúd, bude tiež produkovať harmonickú stratu; jadro má hysterézny efekt vírivých prúdov, v striedavom magnetickom poli bude tiež produkovať stratu, veľkosť materiálu, prúd, frekvenciu, napätie, čo sa nazýva strata železa. Straty medi a železa sa prejavia vo forme tvorby tepla, čím sa ovplyvní účinnosť motora. Krokový motor vo všeobecnosti sleduje presnosť polohovania a výstup krútiaceho momentu, účinnosť je relatívne nízka, prúd je vo všeobecnosti väčší a harmonické zložky sú vysoké, frekvencia prúdu sa strieda s rýchlosťou a zmenou, takže krokové motory majú vo všeobecnosti tepelnú situáciu a situácia je vážnejšia ako všeobecný striedavý motor.
III. Konštrukcia kormidla
Servo sa skladá hlavne z krytu, dosky plošných spojov, hnacieho motora, reduktora a prvku na detekciu polohy. Princíp jeho fungovania spočíva v tom, že prijímač vyšle signál do serva a IC na doske plošných spojov poháňa bezjadrový motor, aby sa začal otáčať, a výkon sa prenáša na otočné rameno cez redukčný prevod a zároveň detektor polohy posiela signál späť, aby zistil, či dorazil do polohy alebo nie. Detektor polohy je vlastne premenlivý odpor. Keď sa servo otáča, hodnota odporu sa zodpovedajúcim spôsobom zmení a uhol natočenia môže byť známy detekciou hodnoty odporu. Všeobecný servomotor je tenký medený drôt omotaný okolo trojpólového rotora, keď prúd preteká cievkou, generuje magnetické pole a obvod magnetu rotora vytvára odpudzovanie, ktoré zase generuje rotačnú silu. Podľa fyziky je moment zotrvačnosti predmetu priamo úmerný jeho hmotnosti, takže čím väčšia je hmotnosť predmetu, ktorý sa má otáčať, tým väčšia je potrebná sila. Aby sa dosiahla vysoká rýchlosť otáčania a nízka spotreba energie, servo je vyrobené z tenkých medených drôtov skrútených do veľmi tenkého dutého valca, ktorý tvorí veľmi ľahký dutý rotor bez pólov, a vo vnútri valca, ktorý je motorom s dutou miskou, sú umiestnené magnety.
Aby vyhovovali rôznym pracovným prostrediam, existujú servá s vodotesným a prachotesným dizajnom; a v reakcii na rôzne požiadavky na zaťaženie existujú plastové a kovové prevody pre servá a kovové prevody pre servá sú vo všeobecnosti vysoko krútiace a vysokorýchlostné, s výhodou, že prevody nebudú prasknuté v dôsledku nadmerného zaťaženia. Servá vyššej triedy budú vybavené guľôčkovými ložiskami, aby bola rotácia rýchlejšia a presnejšia. Je rozdiel medzi jedným guľôčkovým ložiskom a dvoma guľôčkovými ložiskami, lepšie sú samozrejme dve guľôčkové ložiská. Nové FET servá využívajú hlavne FET (Field Effect Transistor), ktorý má výhodu nízkeho vnútorného odporu, a teda menšiu stratu prúdu ako bežné tranzistory.
IV. Princíp činnosti serva
Z vlny pwm do vnútorného obvodu na generovanie predpätia, generátor stýkača cez redukčný prevod poháňa potenciometer do pohybu, takže keď je rozdiel napätia nula, motor sa zastaví, aby sa dosiahol účinok serva.
Protokoly pre servo PWM sú všetky rovnaké, ale najnovšie servá, ktoré sa objavia, sa môžu líšiť.
Protokol je vo všeobecnosti: šírka vysokej úrovne za 0,5 ms ~ 2,5 ms na ovládanie otáčania serva cez rôzne uhly.
V. Ako fungujú servomotory
Obrázok nižšie zobrazuje riadiaci obvod servomotora vyrobený s výkonovým operačným zosilňovačom LM675 a motor je jednosmerný servomotor. Ako je zrejmé z obrázku, výkonový operačný zosilňovač LM675 je napájaný 15V a napätie 15V sa pridáva na fázový vstup operačného zosilňovača LM675 cez RP 1 a výstupné napätie LM675 sa pridáva na vstup servomotora. Motor je vybavený generátorom signálu merania rýchlosti pre detekciu otáčok motora v reálnom čase. V skutočnosti je generátor signálu rýchlosti akýmsi generátorom a jeho výstupné napätie je úmerné rýchlosti otáčania. Výstup napätia z generátora G signálu na meranie rýchlosti sa za obvodom deliča napätia privádza späť na invertujúci vstup operačného zosilňovača ako signál chyby rýchlosti. Hodnota napätia nastavená rýchlostným povelovým potenciometrom RP1 sa pripočítava na fázový vstup operačného zosilňovača po delení napätia R1.R2, ktoré je ekvivalentné referenčnému napätiu.
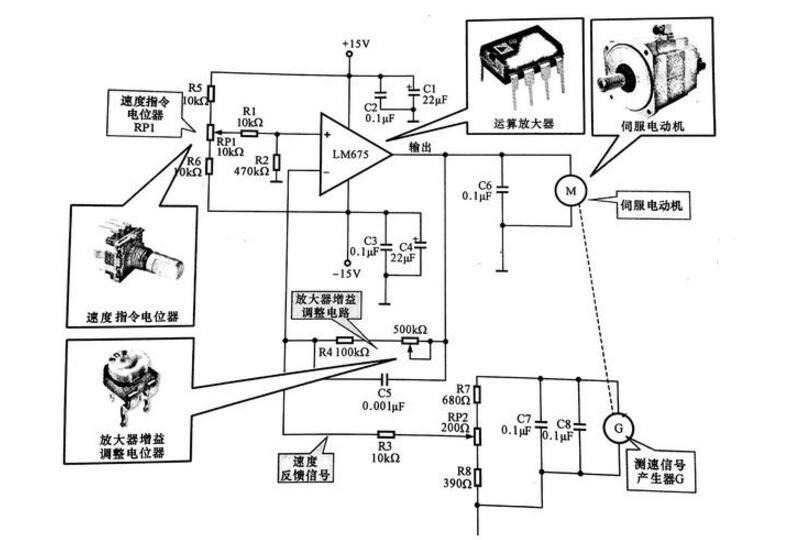
Schéma riadenia servomotora
Servomotor: Označený písmenom M pre servomotor, je zdrojom energie pre pohonný systém. Operačný zosilňovač: označený názvom obvodu, t.j. LM675, je časť zosilňovača v obvode riadenia serva, ktorá poskytuje hnací prúd pre servomotor.
Potenciometer príkazu rýchlosti RP1: Nastavuje referenčné napätie operačného zosilňovača v obvode, t.j. nastavenie rýchlosti. Potenciometer nastavenia zosilnenia zosilňovača RP2: Používa sa v obvode na jemné doladenie zosilnenia zosilňovača a veľkosti signálu spätnej väzby otáčok.
Pri zmene zaťaženia motora sa mení aj napätie privádzané späť na invertovaný vstup operačného zosilňovača, t.j. pri zvyšovaní zaťaženia motora sa rýchlosť znižuje a výstupné napätie generátora rýchlostného signálu tiež klesá, takže napätie na invertovanom vstupe operačného zosilňovača klesá a rozdiel medzi týmto napätím a referenčným napätím sa zvyšuje a výstupné napätie operačného zosilňovača sa zvyšuje. Naopak, keď sa záťaž zníži a otáčky motora sa zvýšia, výstupné napätie generátora signálu merania otáčok stúpa, spätnoväzbové napätie pripočítané na invertovaný vstup operačného zosilňovača sa zvýši, rozdiel medzi týmto napätím a referenčným napätím sa zníži, výstupné napätie operačného zosilňovača sa zníži a otáčky motora sa zodpovedajúcim spôsobom znížia, takže rýchlosť otáčania sa môže automaticky stabilizovať na nastavenú hodnotu.
Predchádzajúce:Lichuan NOVÝ produkt --- Ethercat AC servomotor


